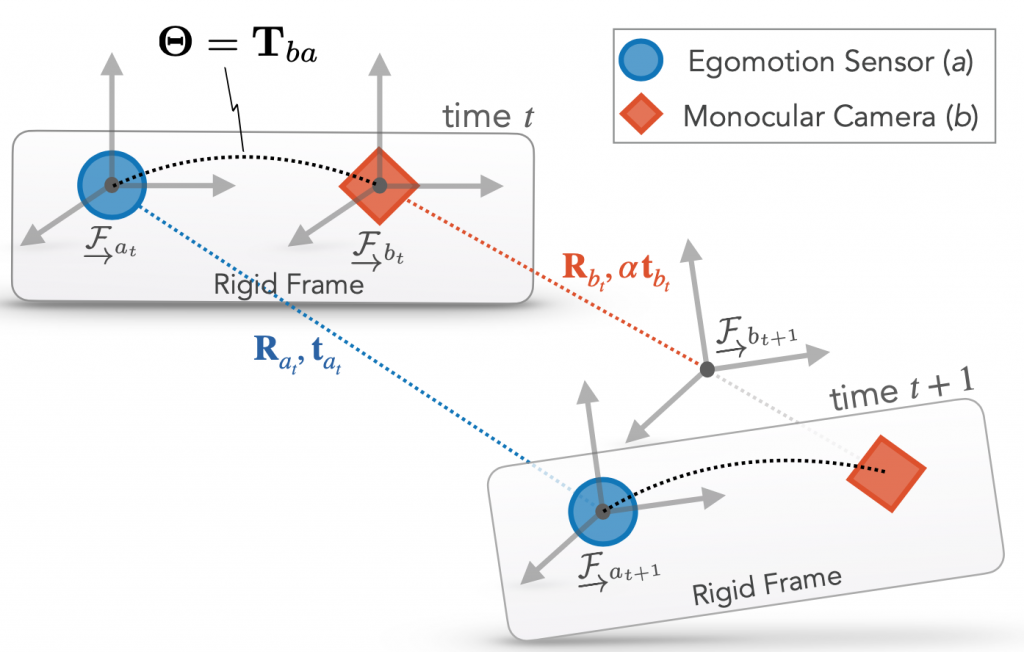
Certifiable Extrinsic Sensor Calibration
Autonomous mobile robots rely on multiple sensors to safely navigate their environment. ARCO Lab is building truly power-on-and-go calibration algorithms with formal optimality guarantees for a variety of sensor configurations and systems.
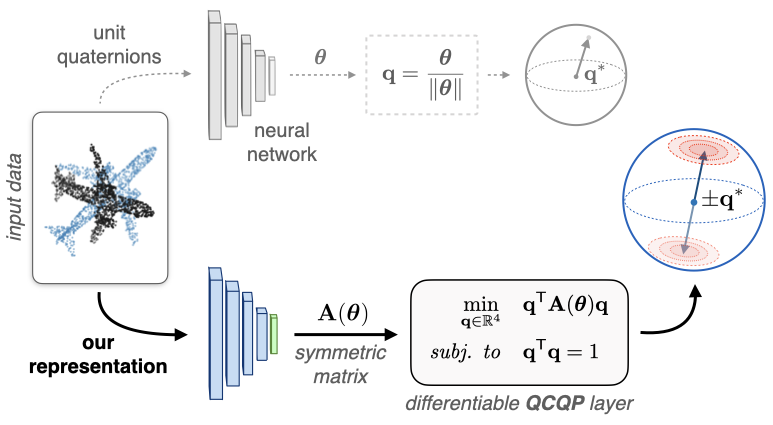
Machine Learning for Robot Perception and Planning
State-of-the-art deep learning models are not safe or interpretable enough to incorporate in safety-critical applications of robotics. We are exploring methods that combine classical estimation theory and physics to bridge this gap and build robust robotic systems.
Optimal Design of Perception and Control Systems
Many design problems involving sensors or actuators can be formulated as set function maximization. ARCO Lab is actively developing algorithms that provide efficient solutions to these difficult combinatorial problems, often with optimality guarantees.
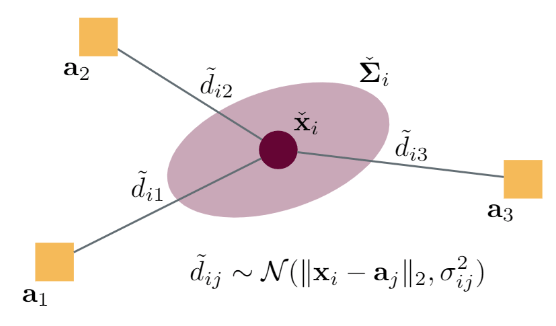
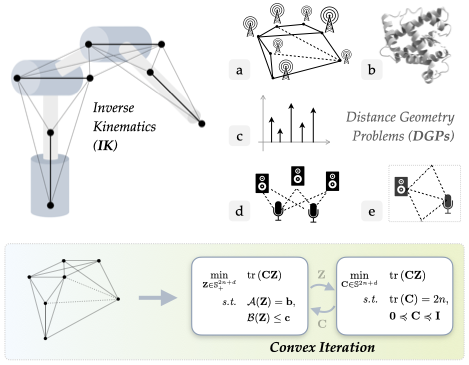
Distance Geometry and Robotics
We are leveraging a distance-geometric formulation of robot kinematics to develop novel optimization and learning-based approaches to inverse kinematics and motion planning.